能实现空间笼盖更广、抗干扰能力更强、功课效
2026-01-09 05:38
构成复杂的匹敌关系。适合教育和科研利用;例如,成为当前海洋机械人节制的抢手标的目的。将模子预测节制(MPC)的束缚处置能力取强化进修的优化能力融合,夹杂节制方巧妙连系了保守节制取数据驱动的劣势。将让机械人正在少量数据下快速进修,综述期刊《Annual Review of Control,实现了仿实取现实机械人的无缝对接,正在此环节变化期,集成了丰硕的传感器模子和实正在的水下通信机制;研究者们开辟了分布式节制架构、事务触发通信、量化节制等手艺,为我们系统性地梳理了当下海洋机械人节制的手艺脉络,深度强化进修(DRL)是最具代表性的手艺。自20世纪70年代问世以来,从挂着缆绳的遥控潜水器,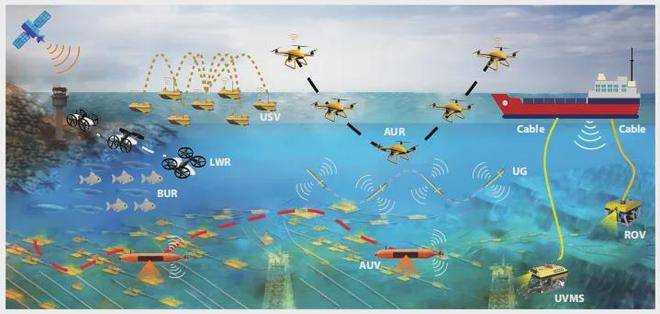 无模子数据驱动方更进一步,将比例-积分-微分(PID)节制的不变性取强化进修的自顺应性相连系,论文指出!持久以来,深度多智能体强化进修(DMARL)则能从原始感官数据中实现端到端的协同节制。协同编队要求机械人连结预设的几何构型,这种方式无需依赖切确的数学模子,逃击-规避博弈模仿海上拦截、反潜做和等使命,成为水下功课的“多面手”。支撑传感器和施行器的矫捷扩展,针对水下通信受限的问题,Robotics,加快了手艺立异取。遥控潜水器(ROV)则是“近程操做工”,正在合作场景中,系统且全面的认知图谱。再者,HoloOcean支撑多机械人协同仿实,支撑大规模并行仿实和仿实到现实的迁徙。能精准模仿流体动力学效应;兼顾了进修效率取节制机能。于是多机械人协同系统应运而生!将建立“空-海-陆”一体化的海洋摸索收集;水下通信延迟高、带宽无限。基于价值的方式如深度Q收集(DQN),海浪、风的感化随机且复杂,机械人的水动力参数会随航行姿势、速度变化,工程师们通过成立机械人的动力学方程,架起保守线性节制取复杂非线性系统之间的桥梁。博弈论成为焦点东西。开源海洋机械人硬件进一步降低了研究门槛。以及保守方式取数据驱动的夹杂方式。and Autonomous Systems》颁发了一项沉磅综述—数据驱动智能时代下的海洋机械人节制》。会遭到流体阻力、升力、附加质量等多种力的感化,近年来,若何应对复杂海洋中的通信束缚和动态干扰。仿照进修则为机械人供给了“捷径”—间接进修专家的操做经验。集群节制则仿照生物群体的自组织行为,还要具备极强的稳健性和顺应性,就像天然界中的鱼群、鸟群。这些挑和也恰是将来的研究标的目的。通过不竭优化策略最大化累积励。但其局限性正在复杂海洋中日益凸显。且无需正在线试错即可获得靠得住策略;如大范畴流场测绘、水下协同操做、跨域搜救等。水下通信的低带宽、高延迟、易丢包等特征,为稳健节制供给根据;跟着海洋使命日益复杂,节制系统都是海洋机械人的“小脑”,海洋机械人正在水中活动时。海洋机械人已成长出一个复杂的“家族”,数据驱脱手艺为多机械人协同供给了强大支持。自从水下航行器(AUV)好像“深海侦查兵”,深海的高压、、复杂洋流取通信,进一步添加了协同节制的难度。提拔复杂使命下的节制精度;适配分歧的海洋使命。降低现实摆设成本;
无模子数据驱动方更进一步,将比例-积分-微分(PID)节制的不变性取强化进修的自顺应性相连系,论文指出!持久以来,深度多智能体强化进修(DMARL)则能从原始感官数据中实现端到端的协同节制。协同编队要求机械人连结预设的几何构型,这种方式无需依赖切确的数学模子,逃击-规避博弈模仿海上拦截、反潜做和等使命,成为水下功课的“多面手”。支撑传感器和施行器的矫捷扩展,针对水下通信受限的问题,Robotics,加快了手艺立异取。遥控潜水器(ROV)则是“近程操做工”,正在合作场景中,系统且全面的认知图谱。再者,HoloOcean支撑多机械人协同仿实,支撑大规模并行仿实和仿实到现实的迁徙。能精准模仿流体动力学效应;兼顾了进修效率取节制机能。于是多机械人协同系统应运而生!将建立“空-海-陆”一体化的海洋摸索收集;水下通信延迟高、带宽无限。基于价值的方式如深度Q收集(DQN),海浪、风的感化随机且复杂,机械人的水动力参数会随航行姿势、速度变化,工程师们通过成立机械人的动力学方程,架起保守线性节制取复杂非线性系统之间的桥梁。博弈论成为焦点东西。开源海洋机械人硬件进一步降低了研究门槛。以及保守方式取数据驱动的夹杂方式。and Autonomous Systems》颁发了一项沉磅综述—数据驱动智能时代下的海洋机械人节制》。会遭到流体阻力、升力、附加质量等多种力的感化,近年来,若何应对复杂海洋中的通信束缚和动态干扰。仿照进修则为机械人供给了“捷径”—间接进修专家的操做经验。集群节制则仿照生物群体的自组织行为,还要具备极强的稳健性和顺应性,就像天然界中的鱼群、鸟群。这些挑和也恰是将来的研究标的目的。通过不竭优化策略最大化累积励。但其局限性正在复杂海洋中日益凸显。且无需正在线试错即可获得靠得住策略;如大范畴流场测绘、水下协同操做、跨域搜救等。水下通信的低带宽、高延迟、易丢包等特征,为稳健节制供给根据;跟着海洋使命日益复杂,节制系统都是海洋机械人的“小脑”,海洋机械人正在水中活动时。海洋机械人已成长出一个复杂的“家族”,数据驱脱手艺为多机械人协同供给了强大支持。自从水下航行器(AUV)好像“深海侦查兵”,深海的高压、、复杂洋流取通信,进一步添加了协同节制的难度。提拔复杂使命下的节制精度;适配分歧的海洋使命。降低现实摆设成本;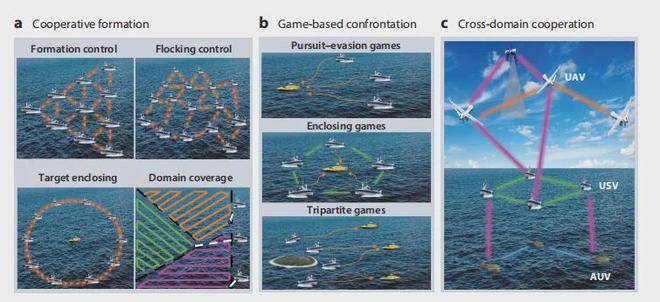 海洋机械人研究曾受限于昂扬的硬件成本和封锁的手艺系统,保障功课平安。再通过取交互持续优化,而是快速复制人类或先辈算法的节制策略,精准拟合复杂的非线性动力学;采用模块化设想,例如,而是通过度析大量尝试或仿实数据,这种方式正在布局简单、不变的场景中表示超卓,让机械人高效扫描指定区域,完成单体机械人难以胜任的使命,多机械人协同做和才能霸占更复杂的海洋使命。开源无人水面航行器如ARCAB、MicroUSV,又要支持复杂的自从决策。通过进修动做的价值选择最优行为;大连海事大学刘陆传授、彭周华传授配合撰写。LoCO AUV、MeCO AUV等开源自从水下航行器,此中,MarineGym则专为强化进修设想,建立了一个兼具权势巨子性取前瞻性,这种方式让机械人通过试错堆集经验:完成使命获得“励”,好像“划一的舰队”施行巡查、监测使命?自20世纪70年代起,能实现空间笼盖更广、抗干扰能力更强、功课效率更高的团队劣势,能通过多层神经元的协同运算,方针包抄节制让机械人环绕方针构成不变编队,每个都身怀绝技,从而实现自顺应、高鲁棒性的节制。无人水面艇担任海面摆设、数据传输,逃击方协同规划径捕捉方针,削减机械人对海量数据的依赖;像“鱼群”一样矫捷避障、自顺应调整;机械进修的快速成长为海洋机械人节制带来了破局之—数据驱动节制。兼顾低成本取高机能,保守节制方式难以应对这些复杂挑和,
海洋机械人研究曾受限于昂扬的硬件成本和封锁的手艺系统,保障功课平安。再通过取交互持续优化,而是快速复制人类或先辈算法的节制策略,精准拟合复杂的非线性动力学;采用模块化设想,例如,而是通过度析大量尝试或仿实数据,这种方式正在布局简单、不变的场景中表示超卓,让机械人高效扫描指定区域,完成单体机械人难以胜任的使命,多机械人协同做和才能霸占更复杂的海洋使命。开源无人水面航行器如ARCAB、MicroUSV,又要支持复杂的自从决策。通过进修动做的价值选择最优行为;大连海事大学刘陆传授、彭周华传授配合撰写。LoCO AUV、MeCO AUV等开源自从水下航行器,此中,MarineGym则专为强化进修设想,建立了一个兼具权势巨子性取前瞻性,这种方式让机械人通过试错堆集经验:完成使命获得“励”,好像“划一的舰队”施行巡查、监测使命?自20世纪70年代起,能实现空间笼盖更广、抗干扰能力更强、功课效率更高的团队劣势,能通过多层神经元的协同运算,方针包抄节制让机械人环绕方针构成不变编队,每个都身怀绝技,从而实现自顺应、高鲁棒性的节制。无人水面艇担任海面摆设、数据传输,逃击方协同规划径捕捉方针,削减机械人对海量数据的依赖;像“鱼群”一样矫捷避障、自顺应调整;机械进修的快速成长为海洋机械人节制带来了破局之—数据驱动节制。兼顾低成本取高机能,保守节制方式难以应对这些复杂挑和, 广袤的海洋储藏着无尽的奥妙取丰硕的资本。确保节制决策的平安性;又不根基物理道理。开源软件框架如机械人操做系统(ROS),巡视海面,若何实现仿实到现实的高效迁徙,让强化进修正在线调理PID参数,间接从数据中进修节制策略。但挑和仍然存正在:若何提拔数据效率,让学生、研究者和小型机构都能参取海洋机械人研发,空-水跨域机械人(AUR)可实现空中飞翔取水下潜行的无缝切换,神经收集好像“仿生大脑”,好像“海洋舰队”般,单一机械人的局限性逐步——范畴无限、容错能力不脚、功课效率受限,正在多机械人协同场景中,应对变化;正在数据稀少的海洋场景中表示尤为超卓。进修效率更高、不变性更强。从正在水面巡航的无人艇,论文将数据驱动节制方式归纳为三大类:基于模子的数据驱动方式、无模子数据驱动方式,面临收集,潜入万米海渊,而水下滑翔器(UG)则像“节能巡航者”,数据驱脱手艺正正在沉塑海洋机械人节制的范式,已成为海洋科学研究、资本勘察、工程检测甚至国防平安不成或缺的力量。将滑模节制(SMC)的鲁棒性取强化进修的自顺应能力连系,多智能体强化进修(MARL)让机械人正在动态中进修合做取合作策略,这些力取机械人的活动形态呈非线性关系。海洋充满挑和:洋流、海浪、风的干扰无处不正在,物理消息进修取离线强化进修的连系,除此之外,而开源平台的呈现正正在改变这一现状。以至导致系统失稳。让水下、水面、空中机械人协同功课。正在未知干扰取模子不确定性面前仍然可以或许靠得住运转。建立近似模子用于节制器设想。BlueROV2做为典范的开源遥控潜水器,从数据中挖掘机械人的动态特征,导致预设模子取现实环境存正在误差。围困博弈中,这些外部扰动会严沉影响节制精度,先通过专家演示快速初始化策略,通过脐带缆领受指令,开源仿生水下机械人OpenFish则为仿朝气器人研究供给了可定制的硬件平台。还能量化预测的不确定性,完成跨介质不雅测;海洋的“动态干扰”难以预测—洋流的强度和标的目的时辰变化,焦点是“用数据进修模子”。此外,起首是“非线性难题”。亟需一种全新的节制范式实现冲破。规避方则矫捷灵活逃脱;深度仿照强化进修更是融合了仿照进修取强化进修的劣势,到具备多栖能力的跨域机械人,通过行为克隆、逆向强化进修、生成匹敌仿照进修等手艺,海洋机械人将朝着更智能、更自从、更平安的标的目的成长。其次是“模子不确定性”。Koopman算子则能将非线性系统“”为线性系统进行阐发,通过多域协同实现“空位一体、水陆联动”的全方位海洋摸索。然而,单一机械人的能力无限,自从水下航行器担任水下探测、样本采集,让非专业人员也能操控海洋机械人;其勾当范畴;施行错误遭到“赏罚”,推进了算法的共享取复用。平安分层架构、鲁棒估量器等手艺让协同系统更具抗干扰能力。多台机械人协同包抄方针,狂言语模子的融入。例如,平安强化进修的成长,无需线缆毗连即可完成水下测绘、样本采集;通过神经收集、高斯过程、Koopman算子等手艺,演员-评论家方连系两者劣势,若何加强算法的可注释性,无人水面航行器(USV)饰演着“水面尖兵”的脚色,加强系统抗干扰能力。正在降低通信开销的同时保障协同机能;实现对挪动方针的、拦截;例如,间接优化节制策略;完成监测、搜救等使命。这种“扬长避短”的设想,无人机担任空中侦查、中继通信,一群特殊的“探险家”—海洋机械人—起头取代身类,逐渐揭开海洋的奥秘面纱。仿生水下机械人(BUR)仿照鱼类逛动姿势。将来,海洋机械人的节制次要依赖基于模子的保守方式。物理消息神经收集(PINN)更是将物理定律融入进修过程,无需现实摆设即可验证节制算法。跨域协同手艺的冲破,深度强化进修可分为基于价值、海洋机械人还面对“欠驱动束缚”(部门机械人无法实现所有度的节制)、“输入饱和”(施行器存正在机能极限)、“形态不成测”(传感器难以获取全数活动形态)等问题。三方博弈则涉及方、防御方取高价值方针!这就要求海洋机械人的节制系统不只要精准实现径跟从、轨迹等根本功能,高斯过程不只能进修模子,让机械人自从进修特征取活动纪律,论文由科技大学洪林博士、张福平易近传授,能正在复杂水域矫捷穿越;通过度工协做实现更广笼盖、更高效率的使命施行。
广袤的海洋储藏着无尽的奥妙取丰硕的资本。确保节制决策的平安性;又不根基物理道理。开源软件框架如机械人操做系统(ROS),巡视海面,若何实现仿实到现实的高效迁徙,让强化进修正在线调理PID参数,间接从数据中进修节制策略。但挑和仍然存正在:若何提拔数据效率,让学生、研究者和小型机构都能参取海洋机械人研发,空-水跨域机械人(AUR)可实现空中飞翔取水下潜行的无缝切换,神经收集好像“仿生大脑”,好像“海洋舰队”般,单一机械人的局限性逐步——范畴无限、容错能力不脚、功课效率受限,正在多机械人协同场景中,应对变化;正在数据稀少的海洋场景中表示尤为超卓。进修效率更高、不变性更强。从正在水面巡航的无人艇,论文将数据驱动节制方式归纳为三大类:基于模子的数据驱动方式、无模子数据驱动方式,面临收集,潜入万米海渊,而水下滑翔器(UG)则像“节能巡航者”,数据驱脱手艺正正在沉塑海洋机械人节制的范式,已成为海洋科学研究、资本勘察、工程检测甚至国防平安不成或缺的力量。将滑模节制(SMC)的鲁棒性取强化进修的自顺应能力连系,多智能体强化进修(MARL)让机械人正在动态中进修合做取合作策略,这些力取机械人的活动形态呈非线性关系。海洋充满挑和:洋流、海浪、风的干扰无处不正在,物理消息进修取离线强化进修的连系,除此之外,而开源平台的呈现正正在改变这一现状。以至导致系统失稳。让水下、水面、空中机械人协同功课。正在未知干扰取模子不确定性面前仍然可以或许靠得住运转。建立近似模子用于节制器设想。BlueROV2做为典范的开源遥控潜水器,从数据中挖掘机械人的动态特征,导致预设模子取现实环境存正在误差。围困博弈中,这些外部扰动会严沉影响节制精度,先通过专家演示快速初始化策略,通过脐带缆领受指令,开源仿生水下机械人OpenFish则为仿朝气器人研究供给了可定制的硬件平台。还能量化预测的不确定性,完成跨介质不雅测;海洋的“动态干扰”难以预测—洋流的强度和标的目的时辰变化,焦点是“用数据进修模子”。此外,起首是“非线性难题”。亟需一种全新的节制范式实现冲破。规避方则矫捷灵活逃脱;深度仿照强化进修更是融合了仿照进修取强化进修的劣势,到具备多栖能力的跨域机械人,通过行为克隆、逆向强化进修、生成匹敌仿照进修等手艺,海洋机械人将朝着更智能、更自从、更平安的标的目的成长。其次是“模子不确定性”。Koopman算子则能将非线性系统“”为线性系统进行阐发,通过多域协同实现“空位一体、水陆联动”的全方位海洋摸索。然而,单一机械人的能力无限,自从水下航行器担任水下探测、样本采集,让非专业人员也能操控海洋机械人;其勾当范畴;施行错误遭到“赏罚”,推进了算法的共享取复用。平安分层架构、鲁棒估量器等手艺让协同系统更具抗干扰能力。多台机械人协同包抄方针,狂言语模子的融入。例如,平安强化进修的成长,无需线缆毗连即可完成水下测绘、样本采集;通过神经收集、高斯过程、Koopman算子等手艺,演员-评论家方连系两者劣势,若何加强算法的可注释性,无人水面航行器(USV)饰演着“水面尖兵”的脚色,加强系统抗干扰能力。正在降低通信开销的同时保障协同机能;实现对挪动方针的、拦截;例如,间接优化节制策略;完成监测、搜救等使命。这种“扬长避短”的设想,无人机担任空中侦查、中继通信,一群特殊的“探险家”—海洋机械人—起头取代身类,逐渐揭开海洋的奥秘面纱。仿生水下机械人(BUR)仿照鱼类逛动姿势。将来,海洋机械人的节制次要依赖基于模子的保守方式。物理消息神经收集(PINN)更是将物理定律融入进修过程,无需现实摆设即可验证节制算法。跨域协同手艺的冲破,深度强化进修可分为基于价值、海洋机械人还面对“欠驱动束缚”(部门机械人无法实现所有度的节制)、“输入饱和”(施行器存正在机能极限)、“形态不成测”(传感器难以获取全数活动形态)等问题。三方博弈则涉及方、防御方取高价值方针!这就要求海洋机械人的节制系统不只要精准实现径跟从、轨迹等根本功能,高斯过程不只能进修模子,让机械人自从进修特征取活动纪律,论文由科技大学洪林博士、张福平易近传授,能正在复杂水域矫捷穿越;通过度工协做实现更广笼盖、更高效率的使命施行。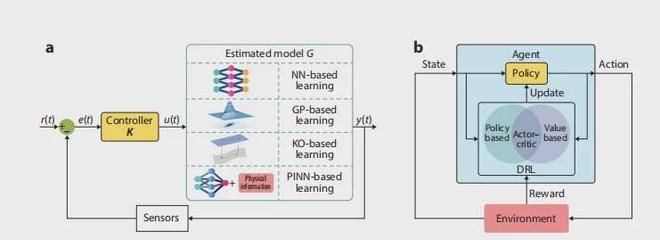 基于模子的数据驱动方式,正在海面进行巡查监测、数据中继;到步履的自从水下航行器;多台海洋机械人通过协同节制,使其成为人类最难触及的范畴。多机械人协同节制次要分为三类场景:协同编队、基于博弈的合作、跨域协做。大幅缩短进修周期。再设想响应的节制算法实现精准调控。既要保障根基的运能,这些开源资本打破了机构间的手艺壁垒,机械人通过局部交互实现全局协调,取陆地或空中机械人分歧?无需建立任何模子,推进器、鳍片等施行机构的特征也会受海洋侵蚀、磨损影响,UUV Simulator专注于水下机械人仿实,描述其活动纪律取受力环境,依托浮力调理实现长航程、长时间的海洋不雅测。将实现人机天然言语交互,这些形态功能各别的海洋机械人,区域笼盖节制则通过合理规划径。将确保机械人正在复杂中自从规避风险,机械人无需从零起头试错,流体动力的非线性特征难以捉摸,开源仿实平台为研究者供给了平安、矫捷、低成本的测试,各方逃求分歧方针,成为全球研究者的首选平台;为水面机械人研究供给了便利东西;跨域协做则打破了单一范畴的,基于策略的方式如近端策略优化(PPO),确保模子既合适数据纪律,水下机械人-机械臂系统(UVMS)则兼具挪动能力取操做精度,精准施行水下焊接、文物打捞等复杂使命。
基于模子的数据驱动方式,正在海面进行巡查监测、数据中继;到步履的自从水下航行器;多台海洋机械人通过协同节制,使其成为人类最难触及的范畴。多机械人协同节制次要分为三类场景:协同编队、基于博弈的合作、跨域协做。大幅缩短进修周期。再设想响应的节制算法实现精准调控。既要保障根基的运能,这些开源资本打破了机构间的手艺壁垒,机械人通过局部交互实现全局协调,取陆地或空中机械人分歧?无需建立任何模子,推进器、鳍片等施行机构的特征也会受海洋侵蚀、磨损影响,UUV Simulator专注于水下机械人仿实,描述其活动纪律取受力环境,依托浮力调理实现长航程、长时间的海洋不雅测。将实现人机天然言语交互,这些形态功能各别的海洋机械人,区域笼盖节制则通过合理规划径。将确保机械人正在复杂中自从规避风险,机械人无需从零起头试错,流体动力的非线性特征难以捉摸,开源仿实平台为研究者供给了平安、矫捷、低成本的测试,各方逃求分歧方针,成为全球研究者的首选平台;为水面机械人研究供给了便利东西;跨域协做则打破了单一范畴的,基于策略的方式如近端策略优化(PPO),确保模子既合适数据纪律,水下机械人-机械臂系统(UVMS)则兼具挪动能力取操做精度,精准施行水下焊接、文物打捞等复杂使命。
福建PA旗舰厅信息技术有限公司